

電磁界シミュレーターによる静電容量式タッチセンサーの電極考察3
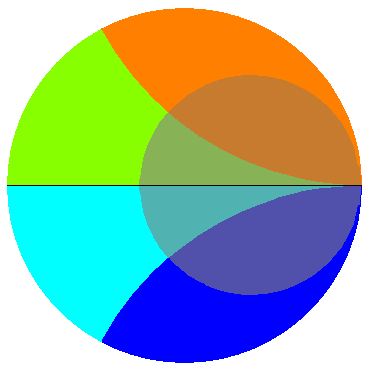
3.1 電極周辺の電場
これまでシミュレーションを行った四種類の形状について電場の状態を想像する。| 2.1 | 電極を空間に浮かせた状態 | 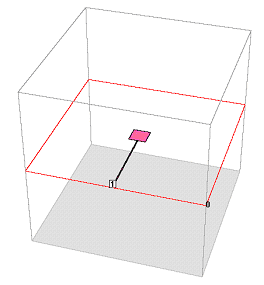 |
電極から四方八方に等しく電気力線が延びてゐる。 |
| 2.2 | 電極と同一面にてGNDで囲んだ状態 | 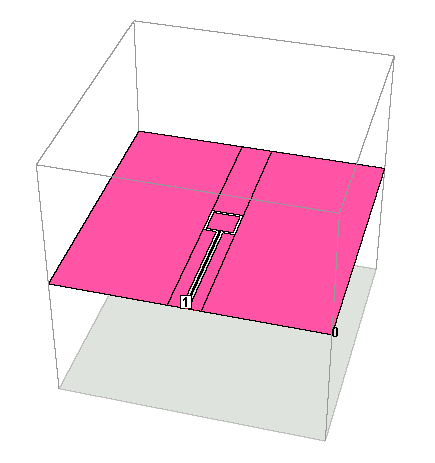 |
電極とGNDの間隙に電気力線が密集し、上下への電気力線は少ない。 |
| 2.3 | t=1.6のFR-4基板を使ひ裏面にベタGNDを配置した状態 | 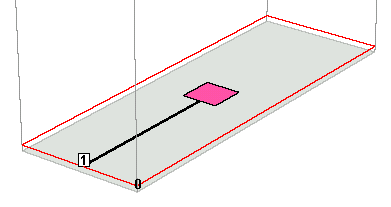 |
電極と裏面GNDの間に電気力線が密集し、上方、横方向への電気力線は少ない。 |
| 2.4 | 電極と同一面にてGNDで囲み、t=1.6のFR-4基板を使ひ裏面にベタGNDを配置した状態 | 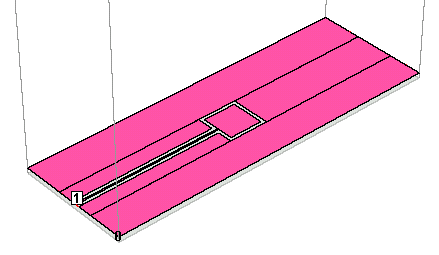 |
電極と裏面GNDの間に電気力線が密集し、同一面GNDとの間隙にある電気力線はそれほど多くなく、上方への電気力線は少ない。 |
2.4については裏面GNDとの距離と同一面GNDとの距離の取り方によって電気力線の密度が逆転することもあり得る。例へば同一面GNDとの距離を非常に小さくし裏面GNDとの距離を大きくすれば、同一面GNDとの電場が強くなるであらう。
3.2 タッチセンサーとしての動作
3.1同様に四種類の形状についてタッチセンサーとして予想される動作についてまとめる。| 2.1 | 電極を空間に浮かせた状態 | 電極から離れた場所でもセンサーが反応しやすい。周囲物体の影響を受けやすい。 |
| 2.2 | 電極と同一面にてGNDで囲んだ状態 | 2.1よりも電極に近いところでセンサーが反応する。周囲物体の影響を受けにくい。GNDとの間隙を指で触れると反応が強い。 |
| 2.3 | t=1.6のFR-4基板を使ひ裏面にベタGNDを配置した状態 | 2.1よりも電極に近いところでセンサーが反応する。周囲物体の影響を受けにくい。電極自体の静電容量が大きくなるため、指を触れるときの変化量が小さくなる。 |
| 2.4 | 電極と同一面にてGNDで囲み、t=1.6のFR-4基板を使ひ裏面にベタGNDを配置した状態 | 2.3と同様だが、GNDとの間隙を指で触れると強い反応が得られる。 |
3.2.1 近接センサー向けの電極
近接センサーには形状2.1のやうに電場が広がってゐるものが向いてゐる。電極から離れた場所で反応すること、周囲物体の影響を受けやすいことは近接センサーにとって望ましい性能となる。一方、GNDが電極に接近してある形状は電極から離れた場所の電場が弱いため、近接センサーとしては感度がよくないことになる。このやうな形状の電極をボタンと近接センサーに兼用させる場合には、近接センサー動作時の感度を回路側で増加させる必要がある。
4. 指を触れるときの静電容量変化
次にセンサー電極に指を触れるときのシミュレーションを行った。現実に即してセンサー電極の上にt=1のアクリル板を設置した。指はセンサー電極と同寸法(10□)の導体板で模擬し、人体の静電容量を100pFとした。図7に解析する形状の三次元表示を示す。指に相当する導体板から横方向に出てゐる線は100pFのコンデンサを配置したものである。
| 人体モデル | 静電容量100pF |
| 接触面積 | センサー電極と同寸法 |
| センサー電極カバー | t=1.0アクリル板 比誘電率2.8 |
| その他 | 人体とセンサー装置は接地されてゐる |
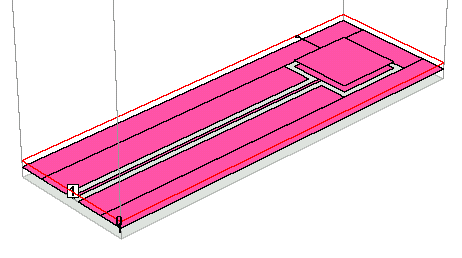
図7
結果は|Z|=1680Ωとなり、静電容量Cは9.47pFとなる。指がない開放時の静電容量は6.44pFであった。およそ+50%の変化が発生する。
| 状態 | インピーダンス | 静電容量 |
| 開放時 | 2471 ohm | 6.44pF |
| 接触時 | 1680 ohm | 9.47pF |
5. まとめ
電磁界シミュレーターSonnet Liteを使って、静電容量式タッチセンサー電極の静電容量と指を接触させるときの静電容量を推測する方法を示した。本稿のシミュレーションは全て無償版のSonnet Liteを使って行った。解析規模がSonnet Liteの制限を超える場合は解析面積を縮小した。解析箱に到達する電気力線が少ない設定ならば、解析面積を縮小しても結果に大きな差は発生しないからである。尚電磁界シミュレーターSonnetを日本で販売してゐるのは有限会社ソネット技研であり、こちらで日本語資料を得ることができる。
以上
作成日 H21.7.24